
Project Overview
Continuum arms / manipulators are a class of robots with many degrees of freedom, leading to highly flexible motion with inherent compliance. These attributes make them well-suited for manipulation tasks and physical interaction with the environment. However, they also are more difficult to control and less intuitive than traditional manipulator designs.
This page provides open-source designs for continuum manipulators to facilitate research of these unique mechanisms. The designs are low-cost and readily reproducible using off-the-shelf components and 3D printing. Software is provided for each design so researchers can control the manipulators easily.
Publications
- Sitler, J., and Wang, L. (2022). A Modular Open-Source Continuum Manipulator for Underwater Remotely Operated Vehicles, ASME Journal of Mechanisms and Robotics (JMR).
- Sitler, J. and Wang, L. (2023). A Redundancy Resolution Method for Free-Floating Underwater Manipulation, under revision.
Design Versions
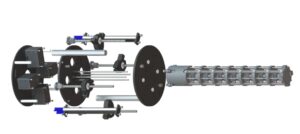
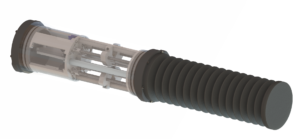
Version 1.0

Files last updated on 10/29/2021.
Description:
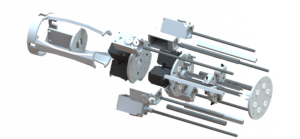
- Underwater continuum manipulator, for use with BlueROV2 or similar underwater ROV.
- Waterproof enclosure protects the actuation unit and allows for underwater operation.
- Lead screws provide high mechanical advantage, allowing for large tendon forces to be generated with high backdrive resistance.
- Arm uses eight links connected by 2 DoF U-joints to create a strong central backbone with very low twist.
- Spring-loaded continuum arm and Nitinol wire tendons add extra stiffness.
- 8 IMU's are connected to each link to provide sensory feedback for shape estimation or other applications.
- Flexible rubber bellows seals the arm and uses weights to achieve neutral buoyancy.
- 6-inch diameter cylinder.
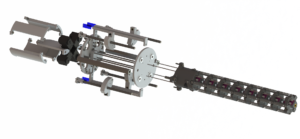
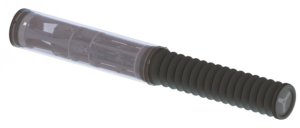
Version 2.0
Files last updated on 06/16/2022.
Description:
- Adapted from Version 1.0.
- 4-inch diameter cylinder.
- IMU Mux integrated into arm base.
- Motors changed to smaller Dynamixel XL330-M288-T to fit inside smaller cyliner.
- Lead screws changed to 1/4"-20 UNC threaded rod for ease of use with standard nuts.
- Electronics mounting plate redesigned.
Version 3.0
Files last updated on 12/05/2022.
Description:
- Two segment continuum manipulator.
- Gearbox designed to utilize larger Dynamixel motors within smaller 4-inch diameter cylinder.
- Number of cables per segment changed from 4 to 3.
- Six cables and motors total.
- Electronics mounting plate redesigned.
- IMUs removed for simplicity.
Team

Justin Sitler
PhD Student

Andrew Cheney
Undergraduate Student

Nick Matranga
Undergraduate Student

Byron Panrudkevich
Undergraduate Student