Current Projects

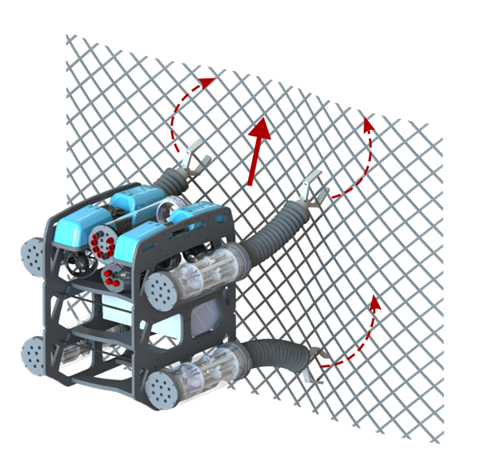

Underwater Manipulation
Modular Continuum Manipulators for Underwater ROVs

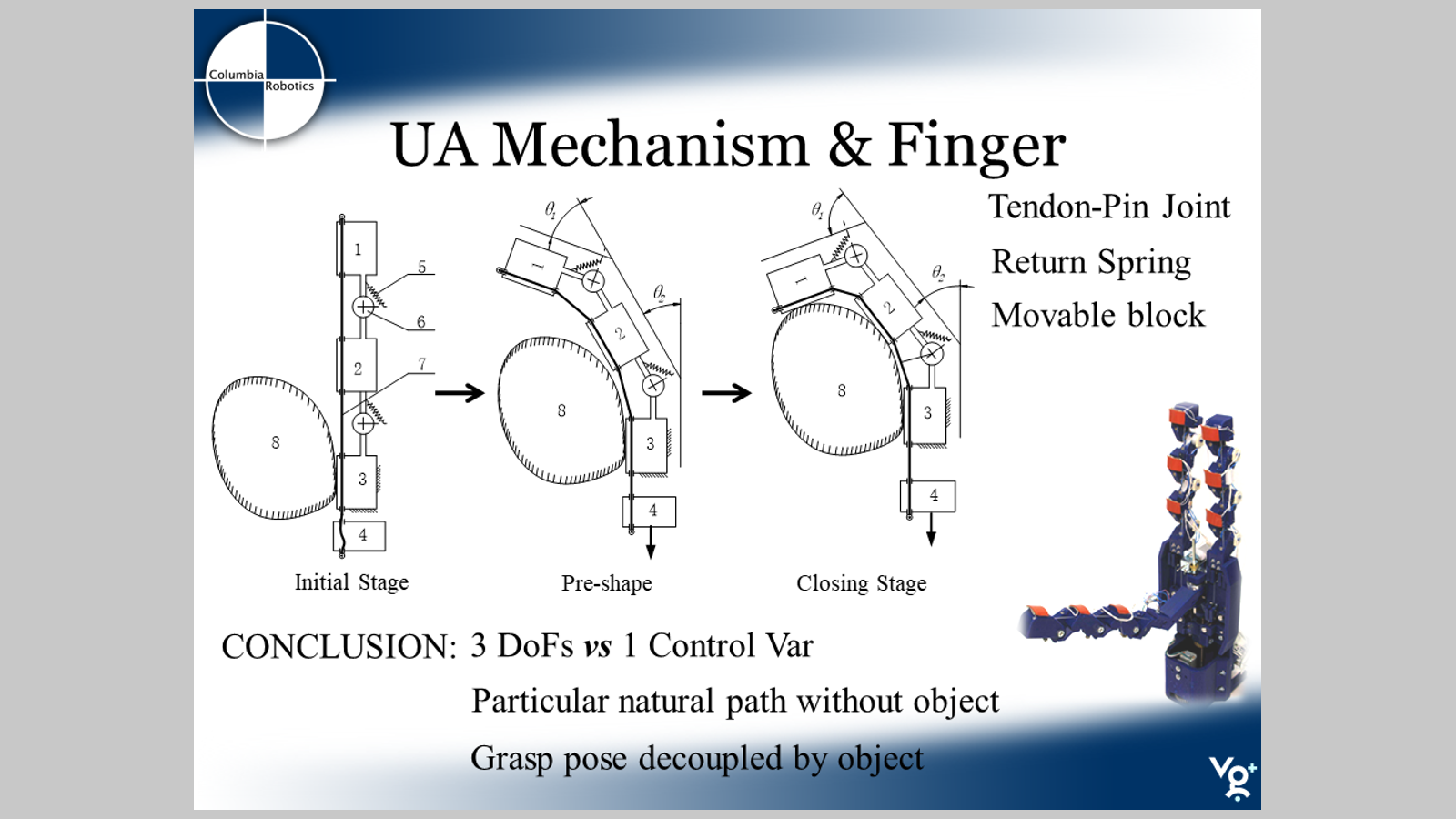
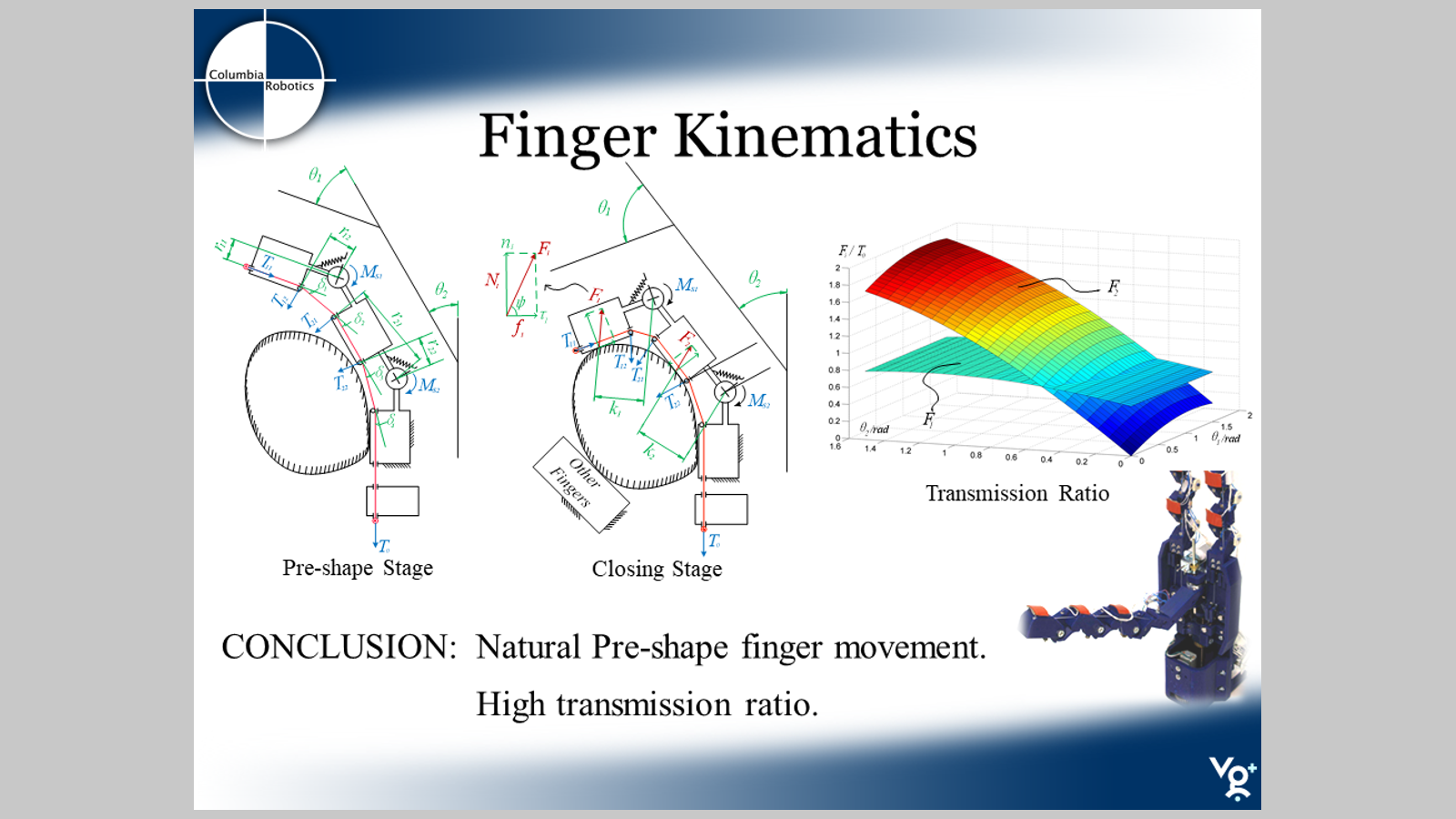
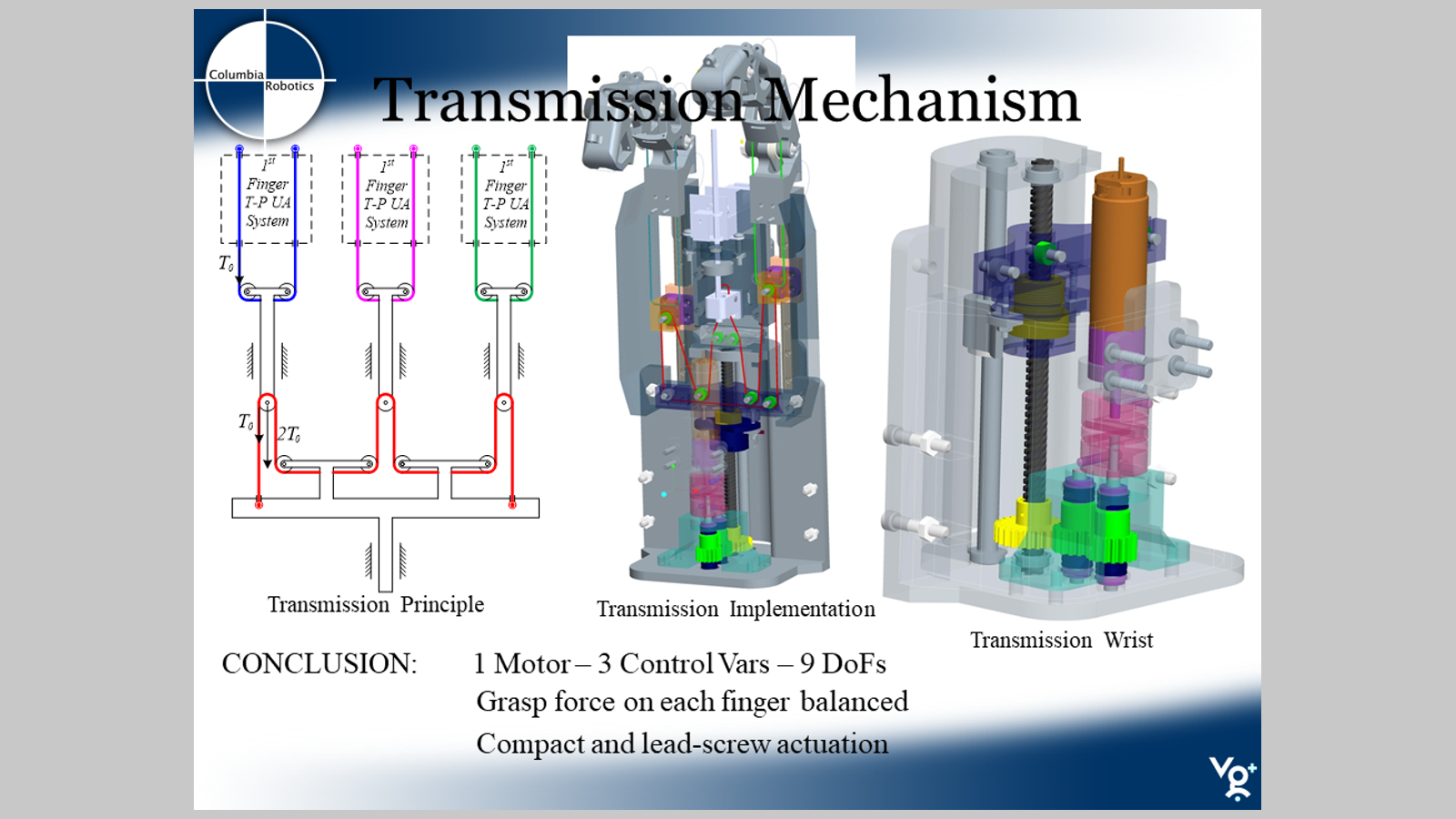
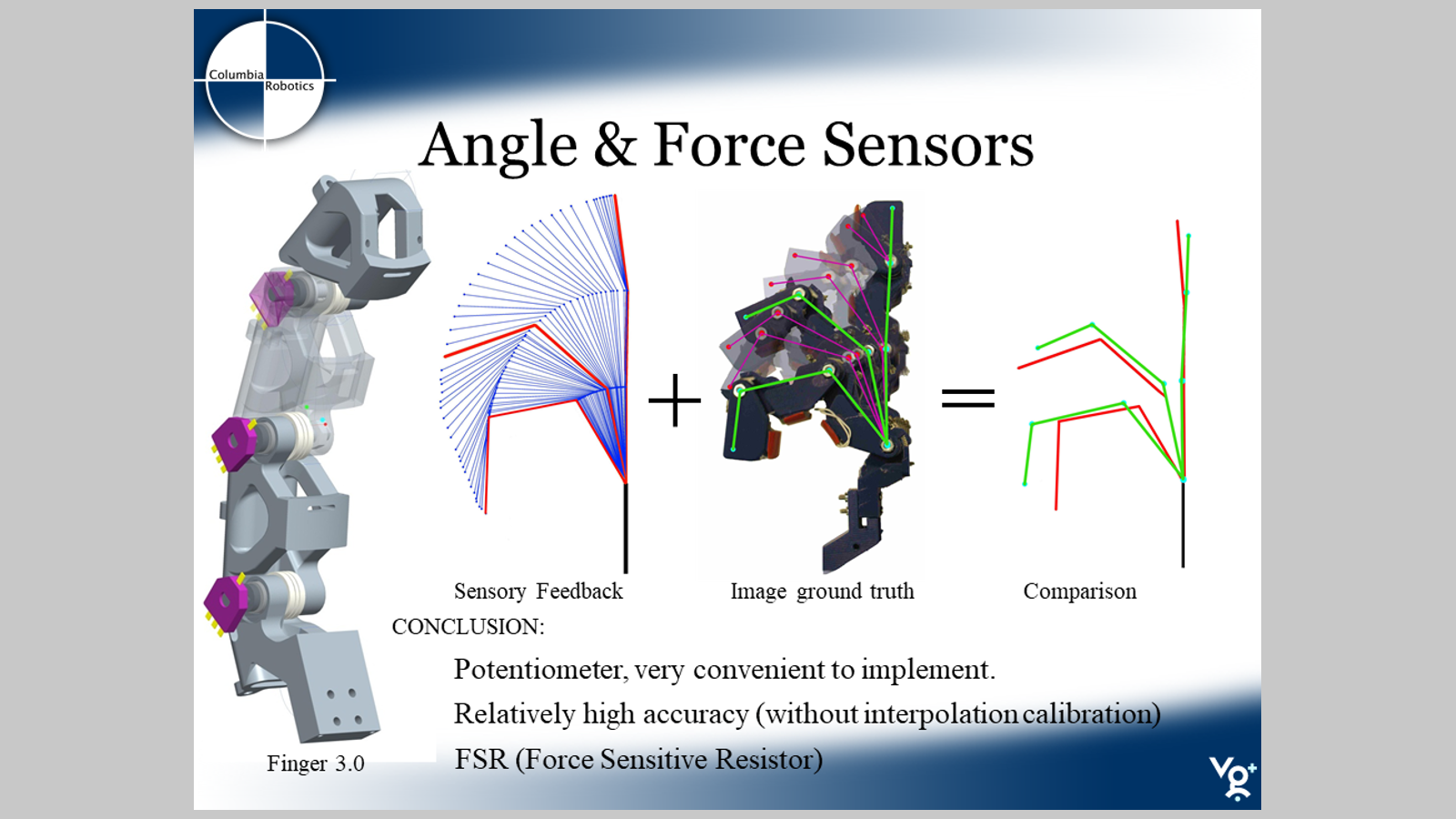
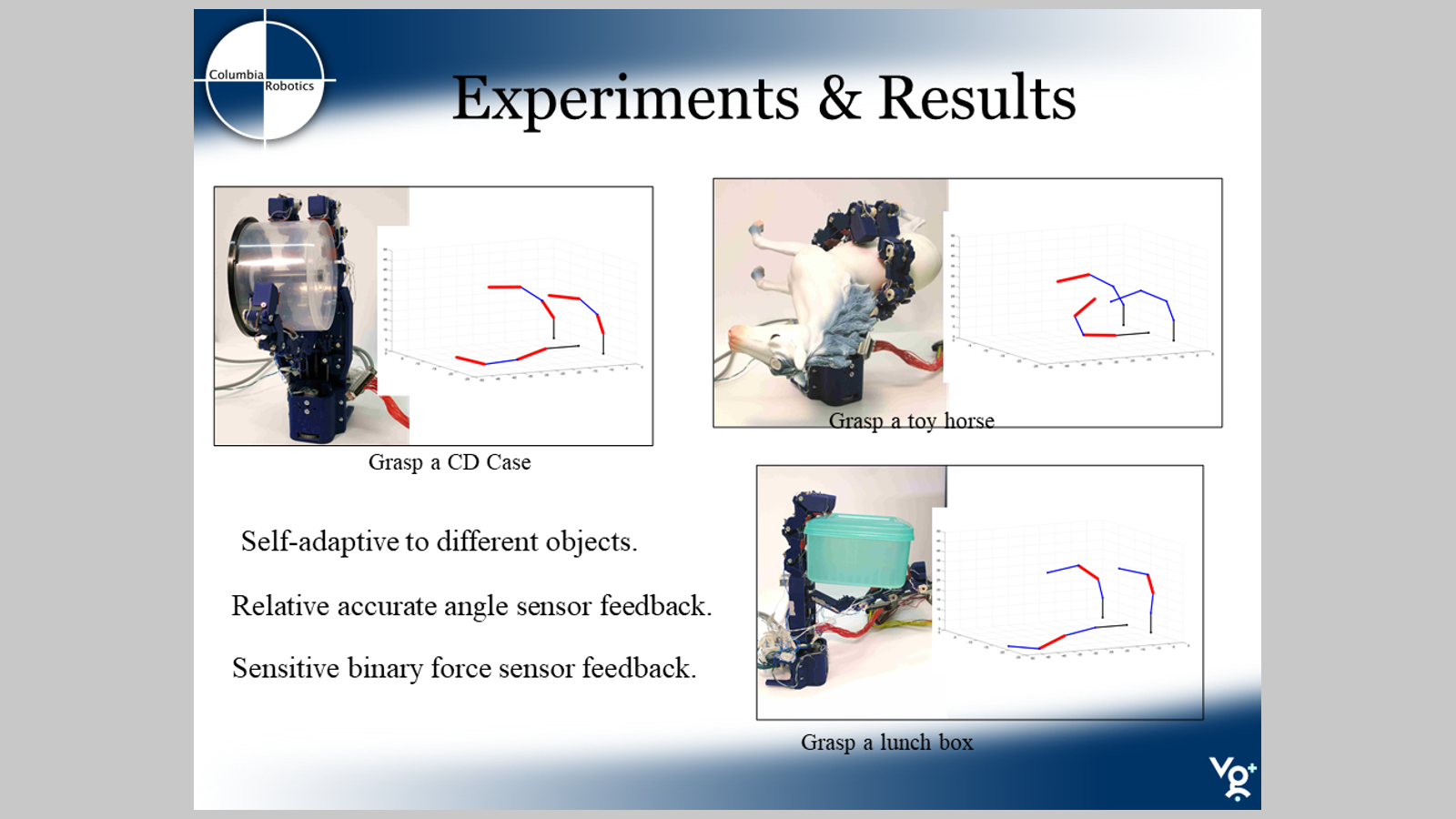
Robotic Hands
Low-cost Underactuated Robotic Hand Designs
Past Projects

More Intelligent Robot Assistance
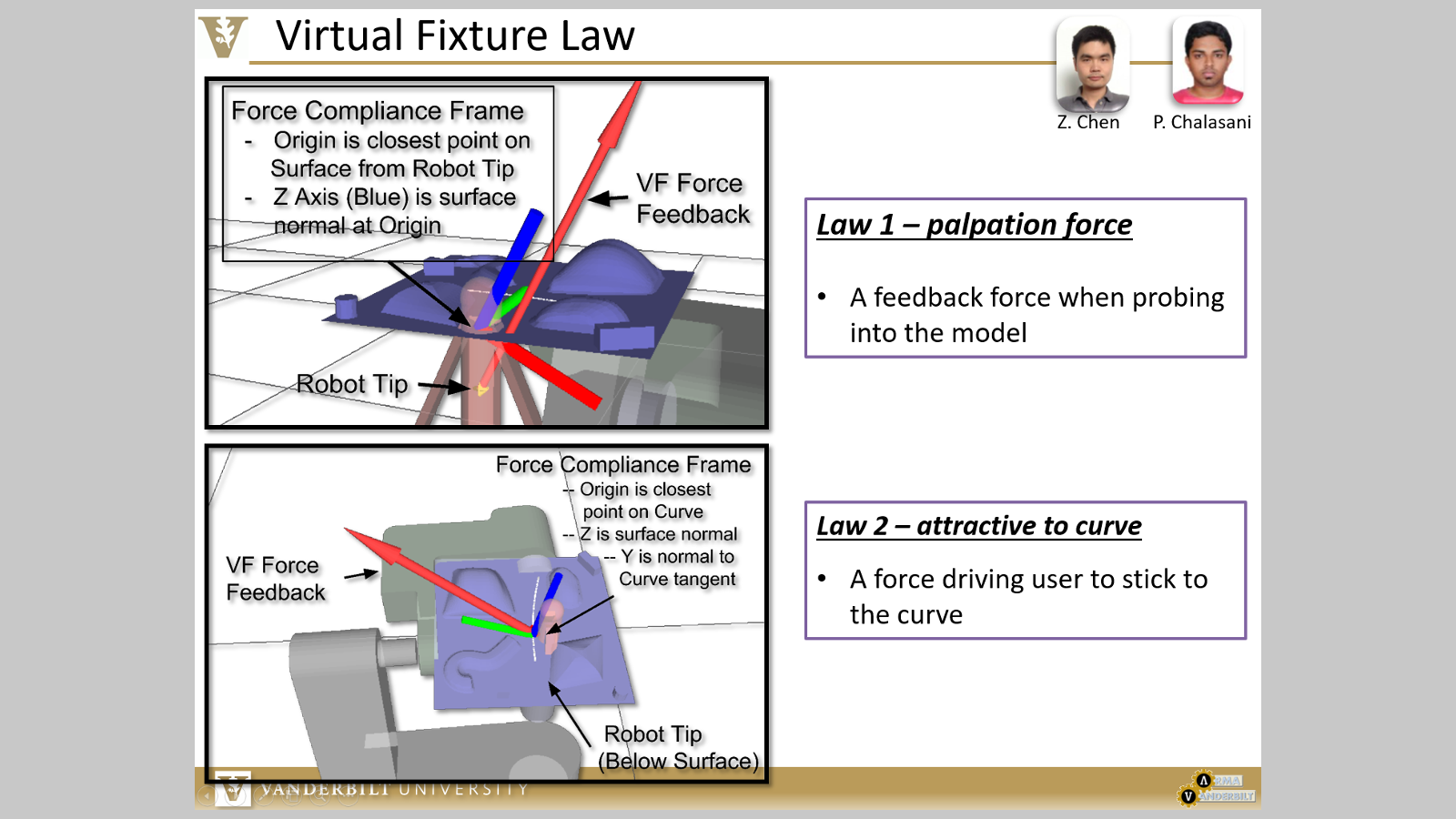
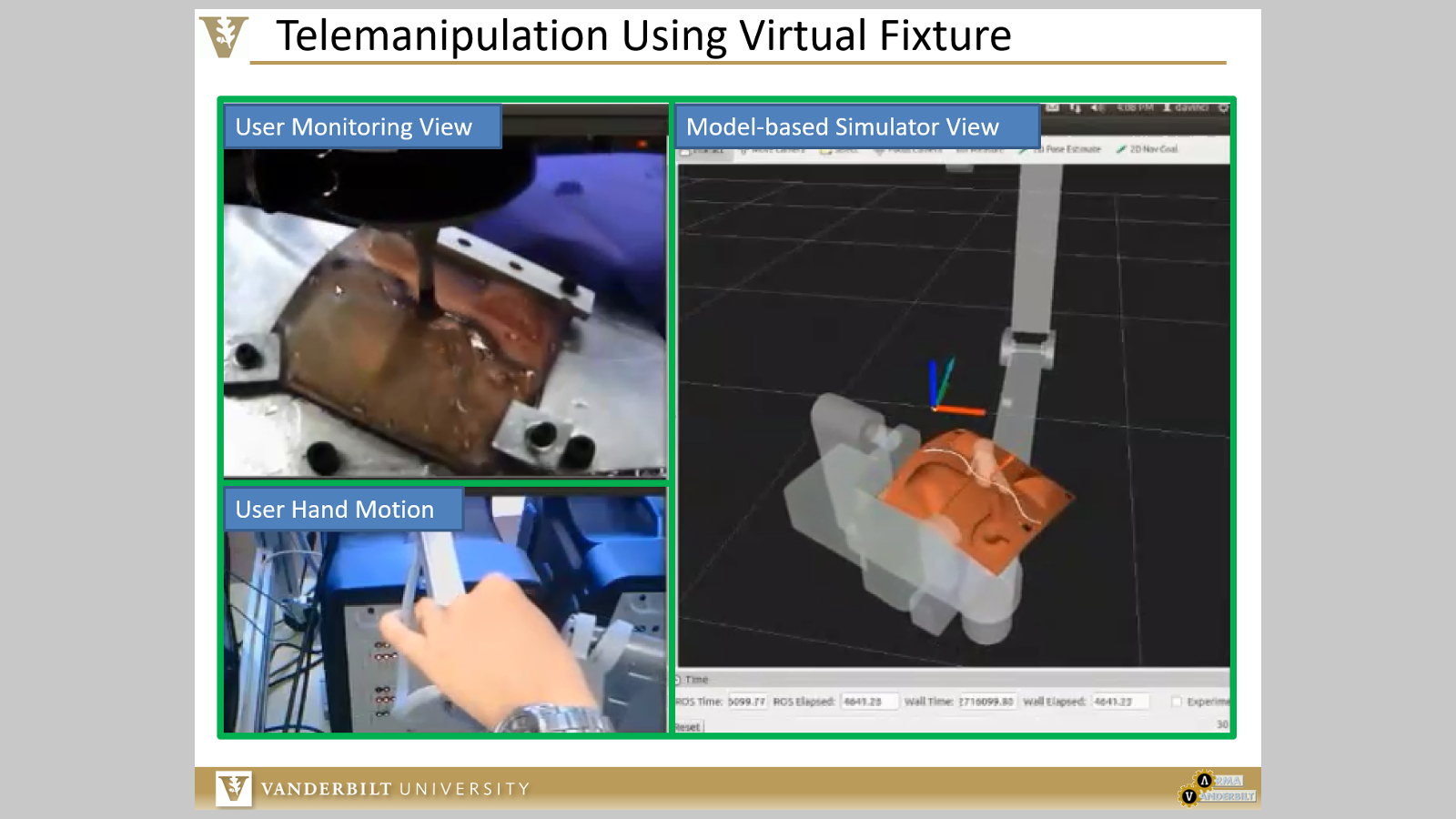
The Use of Force Information in Robot-assisted Minimally Invasive Surgery
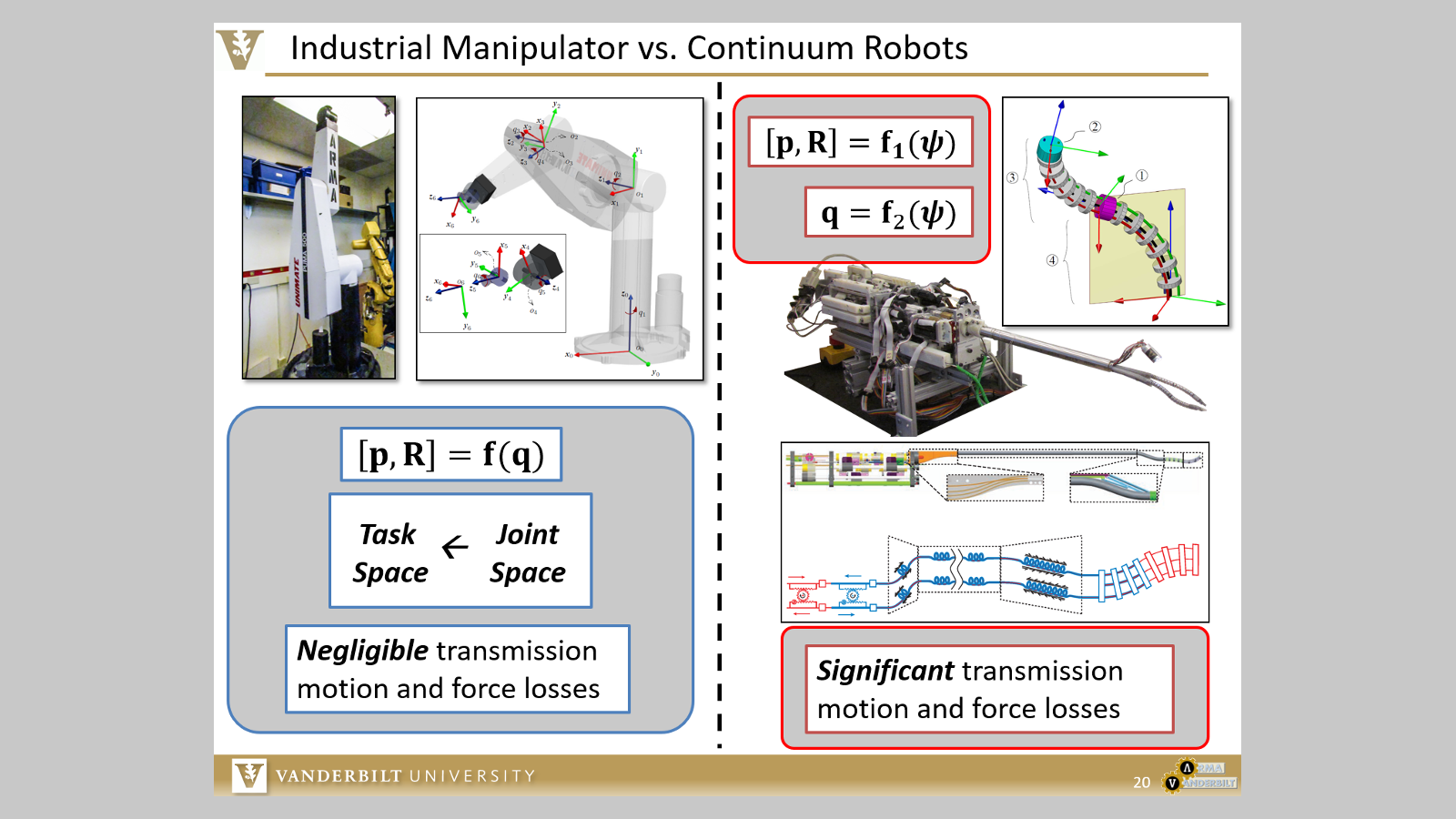
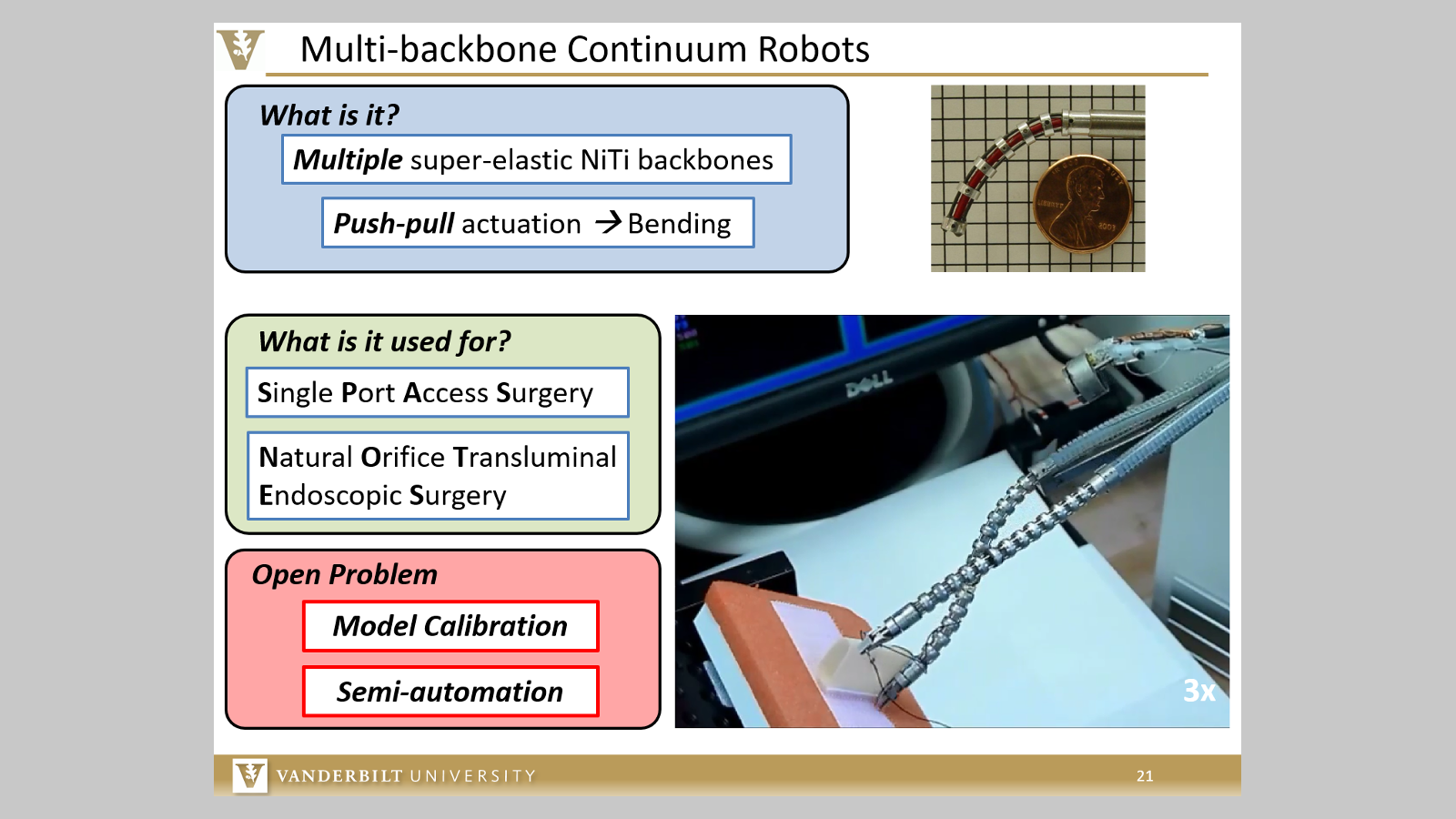
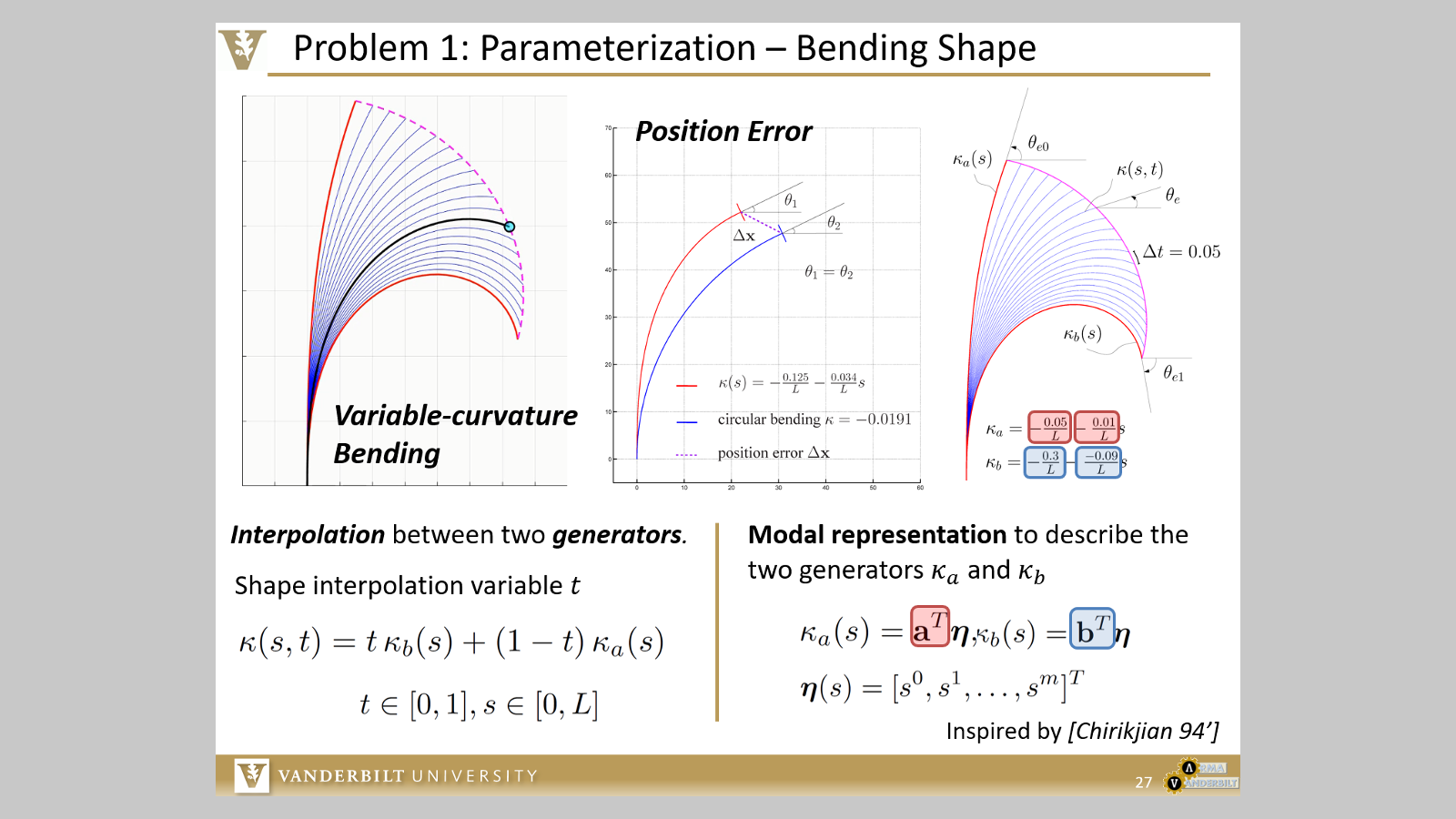
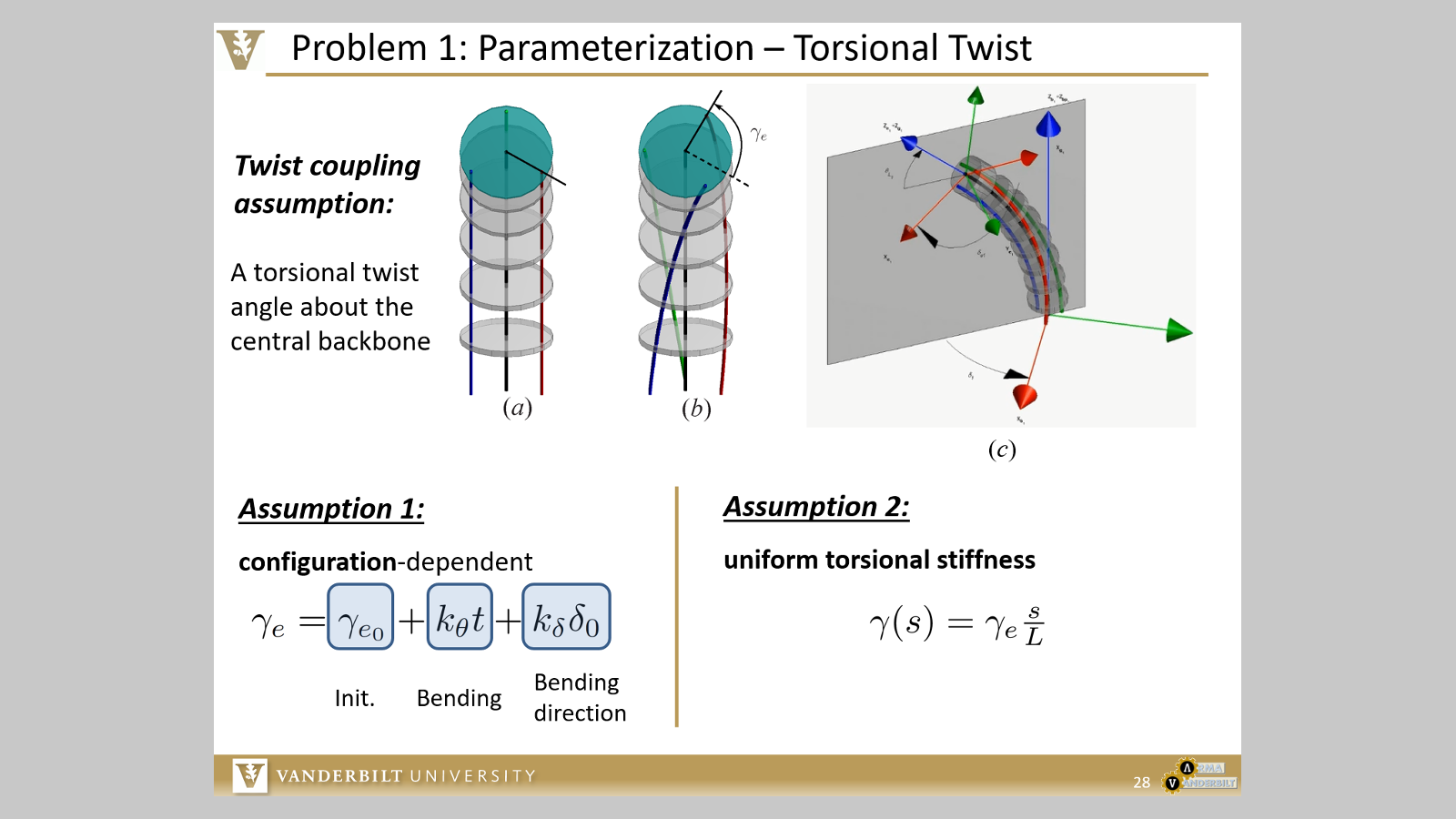
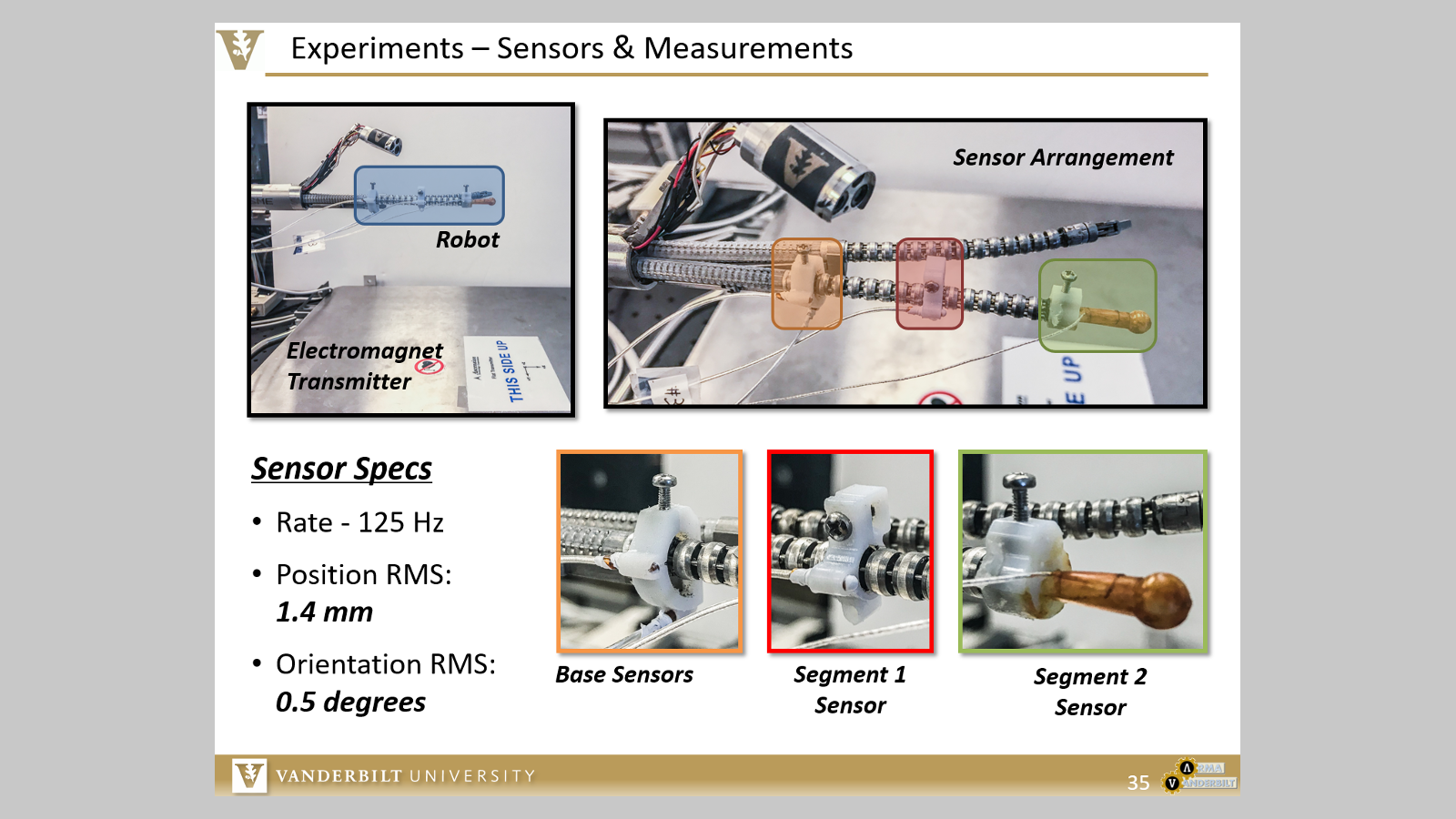
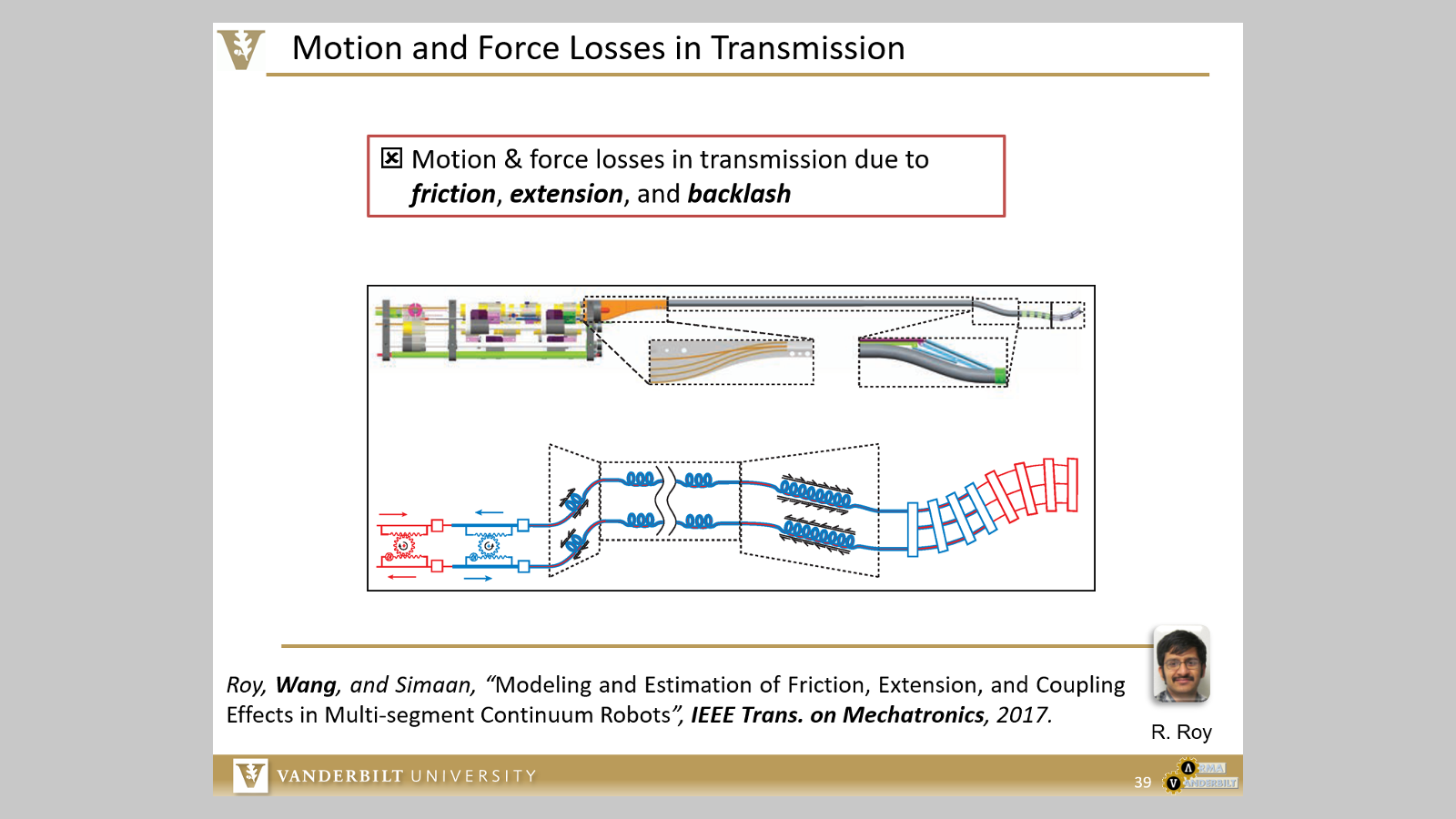
More Accurate Robot Motion
Modeling, Calibration, and Actuation Compensation of Surgical Continuum Robots
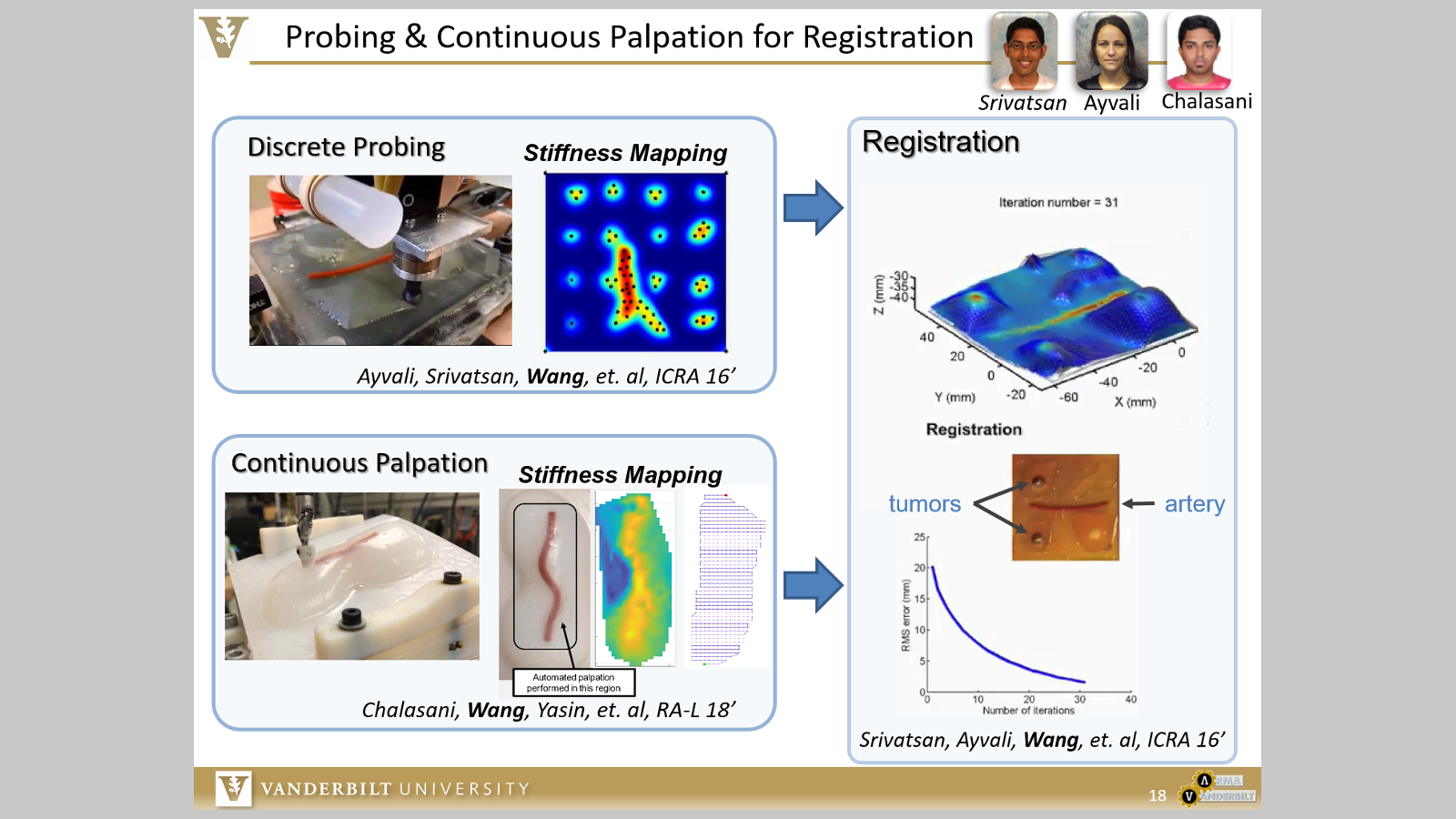
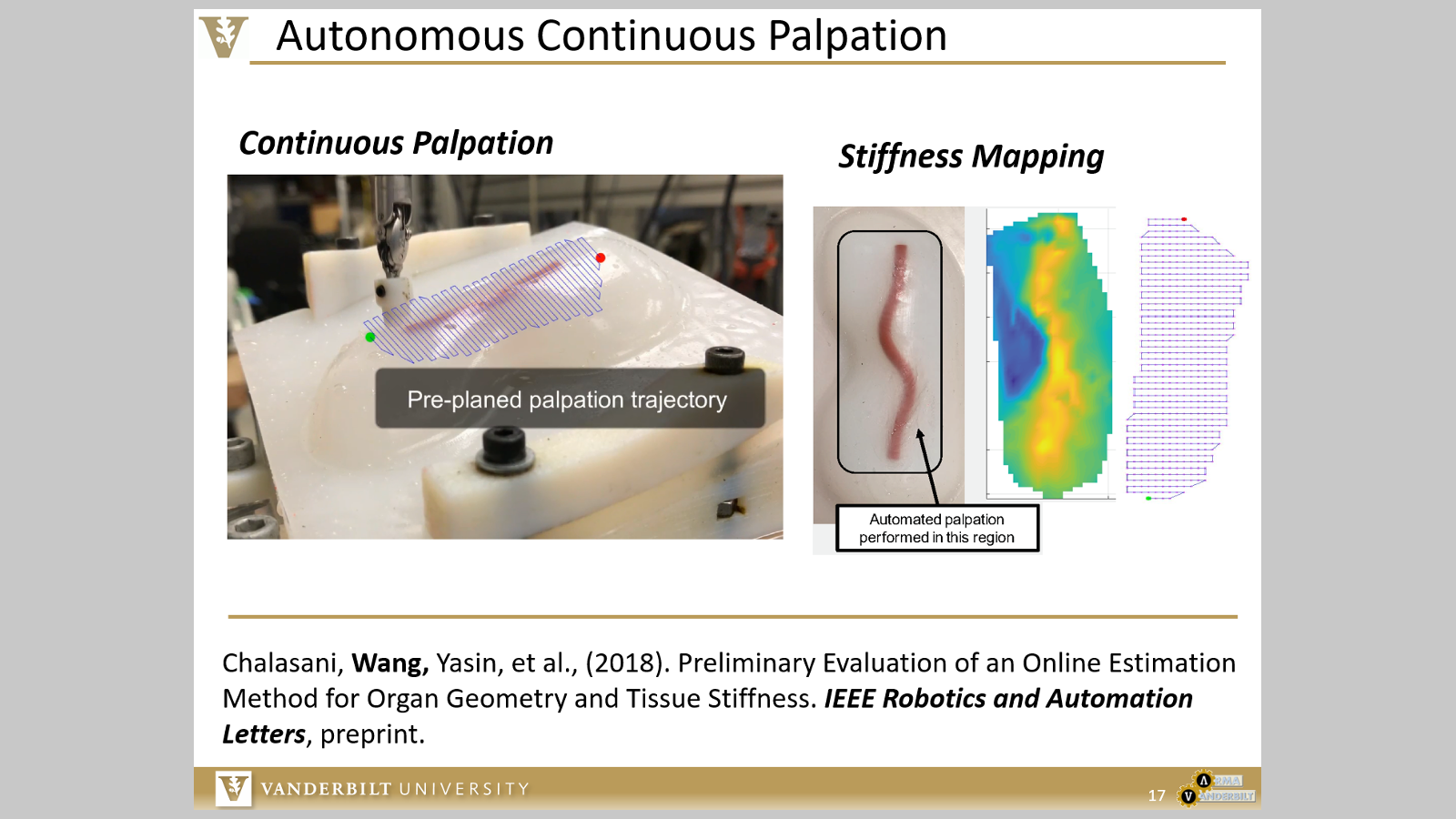
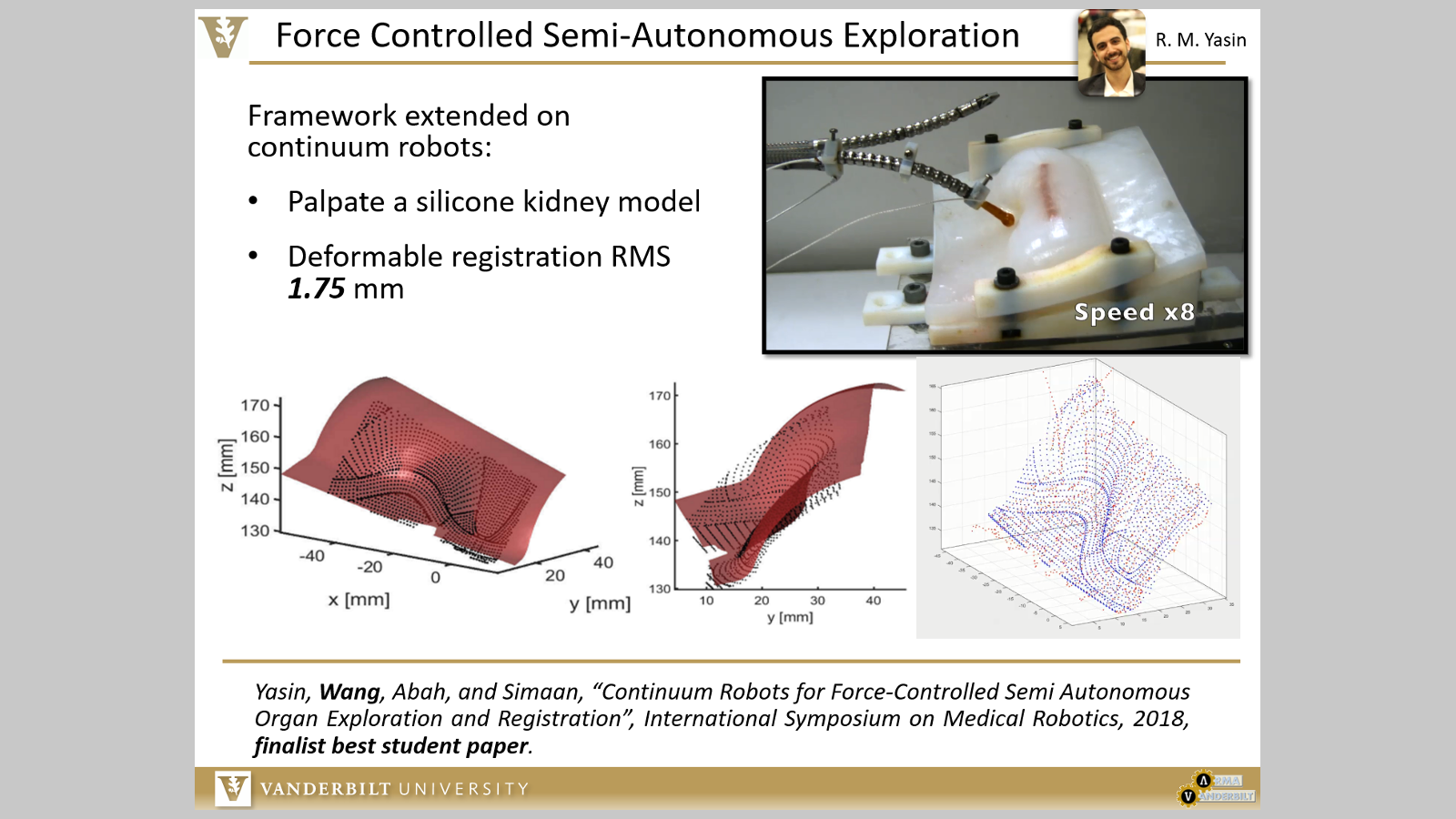
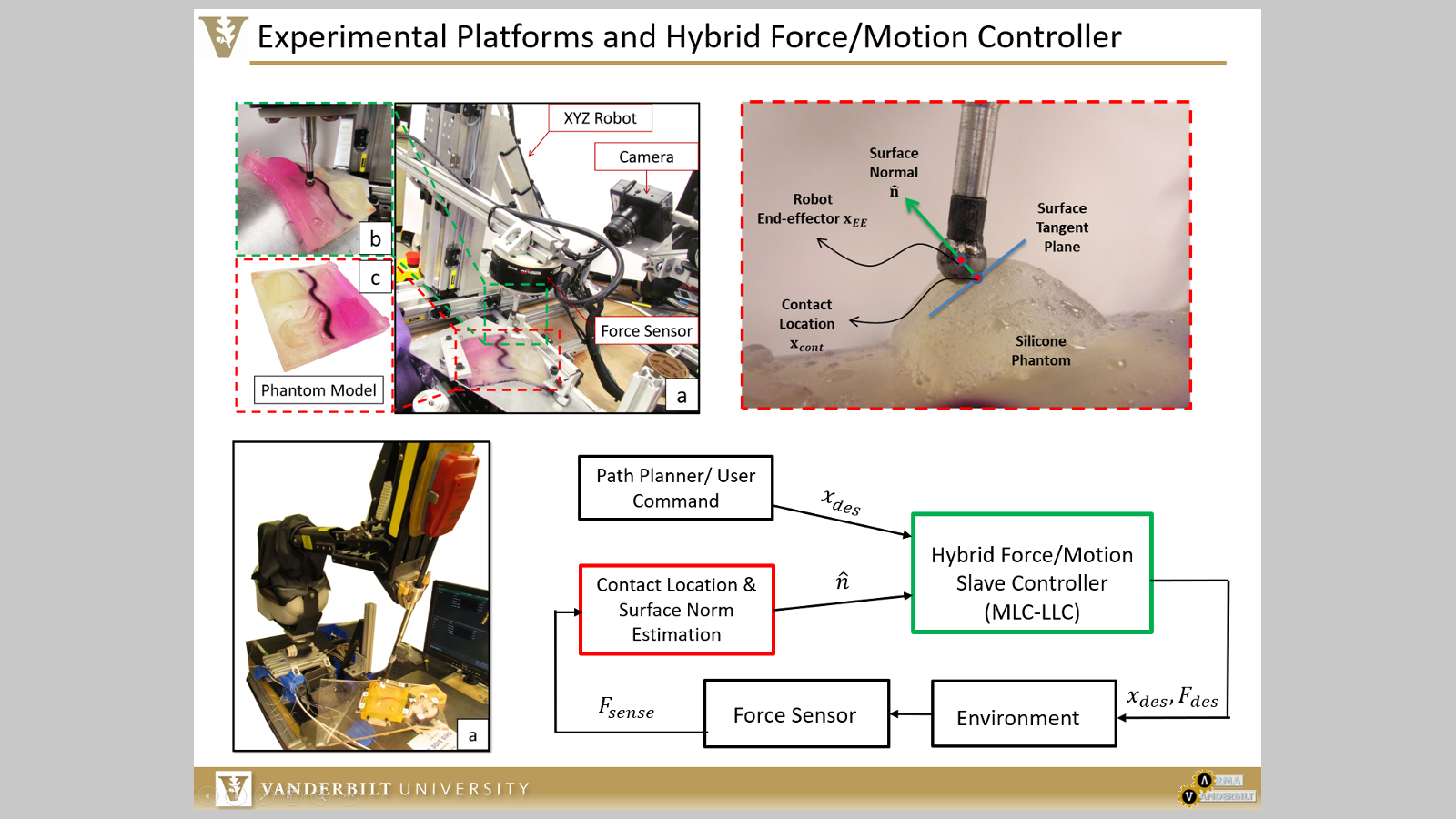
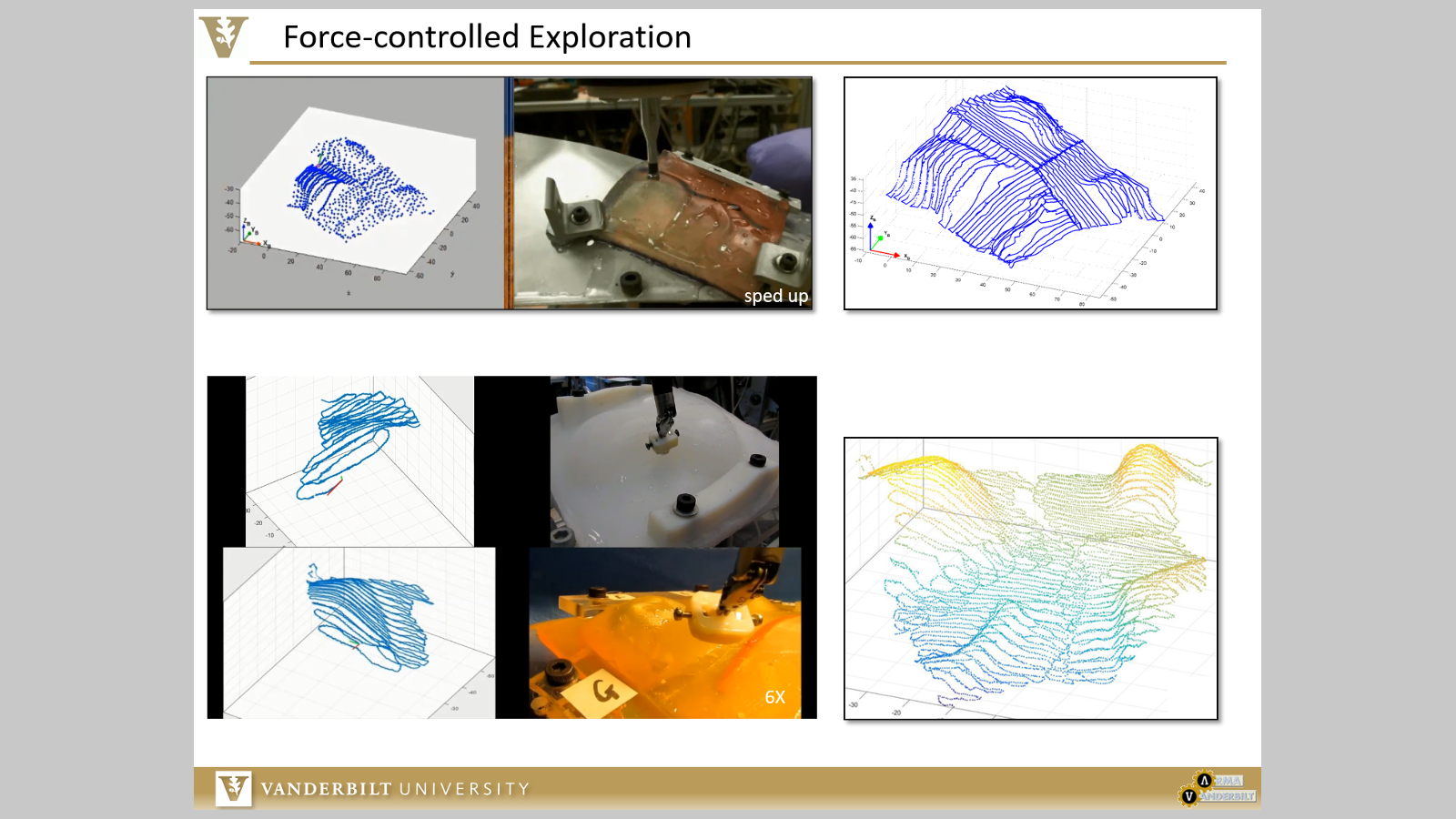
Robot Palpation & Exploration
Force-controlled robot exploration and palpation